Course description
Rectilinear motion & Rotational motion
Rectilinear motion: Linear motion (also called rectilinear motion) is a motion along a straight line, and can therefore be described mathematically using only one spatial dimension. The linear motion can be of two types: uniform linear motion with constant velocity or zero acceleration and non-uniform linear motion with variable velocity or non-zero acceleration. This type of motion describes the movement of a particle or a body. A body is said to experience rectilinear motion if any two particles of the body travel the same distance along two parallel straight lines. The figures below illustrate rectilinear motion for a particle and body. Fig. 1 shows (a) Rectilinear motion of a particle; (b) Rectilinear motion of a body.
(a) (b)
Fig:1
In the above figures, x(t) represents the position of the particles along the direction of motion, as a function of time t. Given the position of the particles, x(t), we can calculate the displacement, velocity, and acceleration.
The acceleration is given by
where a is the acceleration, which we define as constant.
Integrate the above equation with respect to time, to obtain velocity. This gives us
where v(t) is the velocity and C1 is a constant.
Integrate the above equation with respect to time, to obtain position. This gives us
where x(t) is the position and C2 is a constant.
The constants C1 and C2 are determined by the initial conditions at time t = 0. The initial conditions are:
At time t = 0 the position is x1. At time t = 0 the velocity is v1.
Substituting these two initial conditions into the above two equations we get
Therefore C1 = v1 and C2 = x1. This gives us
For convenience, set x(t) = x2 and v(t) = v2. As a result
Displacement is defined as Δd = x2—x1. Therefore, equation (1) becomes
For example, the position x(t) of a particle is given by
Thus, the velocity v(t) is given by
The acceleration a(t) is given by
Rotational motion:
Rotational motion is motion which follows a curved path. Therefore, rotation is a circular movement of an object around a center (or point) of rotation. A three-dimensional object always rotates around an imaginary line called a rotation axis. If the axis passes through the body's center of mass, the body is said to rotate upon itself, or spin.
Fig. 2
Uniform Circular Motion: Uniform circular motion can be described as the motion of an object in a circle at a constant speed. As an object moves in a circle, it is constantly changing its direction. At all instances, the object is moving tangent to the circle. Since the direction of the velocity vector is the same as the direction of the object's motion, the velocity vector is directed tangent to the circle as well.
Fig:3
An object moving in a circle is accelerating. Accelerating objects are objects which are changing their velocity - either the speed (i.e., magnitude of the velocity vector) or the direction. An object undergoing uniform circular motion is moving with a constant speed. Nonetheless, it is accelerating due to its change in direction. The direction of the acceleration is inwards.
The final motion characteristic for an object undergoing uniform circular motion is the net force. The net force acting upon such an object is directed towards the center of the circle. The net force is said to be an inward or centripetal force. Without such an inward force, an object would continue in a straight line, never deviating from its direction. Yet, with the inward net force directed perpendicular to the velocity vector, the object is always changing its direction and undergoing an inward acceleration.
An angular displacement is a change in angular position:
∆θ=θ_2-θ_1
where is the angular displacement, is the initial angular position and is the final angular position
Fig:4
Angular velocity is the change in angular displacement per unit time. The unit is typically rad s−1. The instantaneous angular velocity is given by
ω(t)=dθ/dt
A changing angular velocity indicates the presence of an angular acceleration in rigid body, typically measured in rad s−2. The angular acceleration is the rate of change of the angular velocity.
α(t)=dω/dt=(d^2θ/dt^2)
Linear motion is primarily concerned with displacement, velocity, acceleration, momentum, and force. In comparison, rotational motion primarily deals with angular displacement, angular velocity and acceleration, angular momentum, and torque. Each of these can be seen as definite parallels to the case of linear motion. For example:
v=dx/dt is the classical definition of velocity.
ω=dθ/dtis the definition of angular velocity, as the rate of change of angle.
F=dp/dt=ma is the definition of force in linear dynamics.
τ=dL/dt=Iα is the rotational analogue.
We have angular momentum L as a counterpart to linear momentum p, moment of inertia I as analogue to mass, and angular acceleration α to compare to normal acceleration a.
Distance and displacement:
Distance is a scalar quantity. It measures the actual ground covered. Distance can only be positive.
Displacement is a vector quantity. It is measured with reference to a specific point. It is a straight line from the starting point (origin) to the end point. It is therefore also the shortest distance between two points. If the displacement vector is away from the reference point, it is often defined as positive and if toward it is defined as negative. It is possible to have an average displacement equal to zero if the object starts and ends in the same position.
Fig:5
Problem 1: An object moves from point A to point C along the rectangle shown in the Fig. 6.
a) Find the distance covered by the moving object.
b) Find the magnitude of the displacement of the object.
Fig:6
Solution: a) Distance = AB + BC = 5 + 3 = 8 km
b) Initial point is A and the final point is C, hence the magnitude of the displacement is equal the diagonal AC of the rectangle and is calculated using Pythagora's theorem as follows
AC2 = AB2 + BC2 = 52 + 32 = 25 + 9 = 34
Angular distance: In mathematics (in particular geometry and trigonometry) and all natural sciences (including astronomy, geophysics, etc.), the angular distance (angular separation, apparent distance, or apparent separation) between two point objects, as observed from a location different from either of these objects, is the size of the angle between the two directions originating from the observer and pointing towards these two objects (Fig. 7).
Angular displacement: When an object is moved on a curved or circular path then this change in its position from initial to final state is shown by the angular displacement. This rotational quantity is angled at which a body rotates around the axis. In simple words, we can say displacement covered in terms of angle. Thus, the displacement of the body moving in the
curved path is represented by Angular displacement. For θ angle and the radius of curved path r, the linear displacement (S) is related to the angular displacement (θ) as: S = r θ (Fig. 8)
where r = radius of the curvature, and the equation is the angular displacement equation.
Fig:8
Problem 2: An object moves from point A to B to C to D along the circle shown in the figure below.
a) Find the distance covered by the moving object.
b) Find the magnitude of the displacement of the object.
Solution: a) The object moves 3/4 of one rotation and therefore the distance d is equal to 3/4 of the circumference and is given by d = (3/4) (2 ᴫr) = (3/4) (2ᴫ×3) = 4.5ᴫ m
b) Initial point is A and the final point is D, hence the magnitude of the displacement is equal to the distance AD which is calculated using Pythagora's theorem to the triangle AOD as shown in the figure below
AD2 = AO2 + OD2 = 32 + 32 = 18
Magnitude of displacement,
Speed and Velocity:
Speed: It is a scalar quantity that refers to "how fast an object is moving". Speed can be thought of as the rate at which an object covers distance. A fast-moving object has a high speed and covers a relatively large distance in a short amount of time. Contrast this to a slow-moving object that has a low speed; it covers a relatively small amount of distance in the same amount of time. An object with no movement at all has a zero speed. Average speed is the rate of change of distance with time. Instantaneous speed is the first derivative of distance with respect to time.
Average speed v ̅=∆s/∆t, ; Instantaneous speed,v=lim┬(∆t→0) 〖∆s/∆t=ds/dt〗
Fig:10
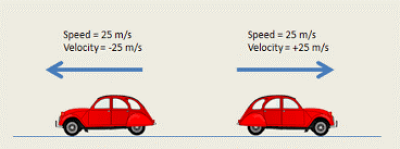
Velocity: It is a physical vector quantity; both magnitude and direction are needed to define it. The velocity of an object is the rate of change of its position with respect to a frame of reference, and is a function of time. Velocity is equivalent to a specification of its speed and direction of motion (e.g. 60 km/h to the north). Average velocity is the rate of change of displacement with time. Instantaneous velocity is the first derivative of displacement with respect to time.
Average velocity, v ̅=∆r/∆t ; Instantaneous velocity, v=lim┬(∆t→0) 〖∆r/∆t=dr/dt〗
Fig:11
Angular speed: Angular speed is the rate at which an object changes its angle (measured) in radians, in a given time period. Angular speed has a magnitude (a value) only.
Angular speed = (final angle) - (initial angle) / time = change in position/time
ω = θ /t
where, ω = angular speed in radians/sec; θ = angle in radians (2π radians = 360 degrees)
t = time (sec).
Angular speed and angular velocity use the same formula; the difference between the two is that Angular speed is a scalar quantity, while angular velocity is a vector quantity.
Fig:12
Angular velocity: In physics, the angular velocity of a rotating body is defined as the rate of change of angular displacement, and is a vector quantity that specifies the angular speed (rotational speed) of an object and the axis about which the object is rotating. This speed can be measured in the SI unit of angular velocity, radians per second, or in terms of degrees per
second, degrees per hour, etc. Angular velocity is usually represented by the symbol omega (ω, rarely Ω).
The direction of the angular velocity vector is perpendicular to the plane of rotation, in a direction that is usually specified by the right-hand rule.
Fig:13
Problem 3: If a person walks at 4 mph, he covers a certain distance. If he walks at 9 mph, he covers 7.5 miles more. How much distance did he actually cover?
Solution: Let the distance covered by that person be ‘d’.
Walking at 4 mph and covering a distance ‘d’ is done in a time of ‘d/4’
If he walks at 9 mph, he covers 7.5 miles more than the actual distance d, which is ‘d + 7.5’.
He does this in a time of (d + 7.5)/9.
Since the time is same in both the cases
d/4 = (d + 7.5)/9 → 9 d = 4 (d + 7.5) → 9 d = 4 d + 30 → d = 6.
Therefore, he covered a distance of 6 miles in 1.5 hours.
Problem 4: The Earth rotates about its axis once every 24 hours (approximately). The radius R of the equator is approximately 4000 miles. Find the angular (radians / second) and linear (feet / second) speed of a point on the equator.
Solution: One rotation every 24 hours (or 24 × 3600 seconds) gives an angular speed ω equal to
ω = 2 ᴫ / (24 × 3600) = 0.0000727 rad/sec
We first convert the radius R in feet: R = 4000 × 5280 = 21,120,000 feet
One rotation every 24 hours (or 24 ×3600 seconds) gives a linear speed v equal to
v = 2 ᴫ R / (24 × 3600) = 2 × ᴫ × 21,120,000 / 86,400 = 1,536 feet / sec
Acceleration:
Linear Acceleration: It is nothing but the acceleration caused by a moving body with uniform acceleration in a straight line. Acceleration is defined as the rate of change of velocity with respect to time. Acceleration is the second derivative of displacement i.e. acceleration can be found by differentiating position with respect to time twice or differentiating velocity with respect to time once. The SI unit of acceleration is m/s2.
Average acceleration,a_av=∆v/∆t=(v_2-v_1)/(t_2-t_1 )
Instantaneous acceleration,a=lim┬(∆t→0) 〖∆v/∆t=dv/dt〗=(d^2x/dt^2)
Fig:14
Angular Acceleration: It is the rate of change of angular velocity. In SI units, it is measured in radians per second squared (rad/s2). Angular acceleration, also called rotational acceleration, is a quantitative expression of the change in angular velocity that a spinning object undergoes per unit time. It is a vector quantity, consisting of a magnitude component and either of two defined directions or senses. The direction of the angular acceleration vector is perpendicular to the plane in which the rotation takes place. If the increase in angular velocity appears clockwise with respect to an observer, then the angular acceleration vector points away from the observer. If the increase in angular velocity appears counterclockwise, then the angular acceleration vector points toward the observer.
Angular acceleration,α=dω/dt=(d^2θ/dt^2)
Fig:15
Problem 5: Mass point moves uniformly in a circle with radius r = 3.2 m angular velocity ω = 4.3 rad/s. Calculate the period, frequency, and the centripetal acceleration of this movement.
Solution:
ω=2πf=2π/T=4.3
T=2π/ω=2π/4.3=1.46
f=1/T=1/1.46=0.68
a=rω^2=3.2×〖4.3〗^2=59.17m/s^2 [F=mv^2/2=mw^2r^2/r=mw^2r]